
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 |
Tags
- 그래프 이론
- MySQL
- DP
- C++
- BFS
- 딥러닝
- two-stage detector
- 머신러닝
- Mask Processing
- machine learning
- real-time object detection
- 강화학습
- dfs
- opencv
- LSTM
- MinHeap
- YoLO
- canny edge detection
- Reinforcement Learning
- One-Stage Detector
- image processing
- object detection
- 백준
- r-cnn
- eecs 498
- AlexNet
- dynamic programming
- CNN
- Python
- deep learning
Archives
- Today
- Total
목록PCD (1)
JINWOOJUNG
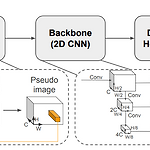 PointPillars: Fast Encoders for Object Detection from Point Clouds
PointPillars: Fast Encoders for Object Detection from Point Clouds
PapaerPointPillars Introduction 자율주행차는 차량, 보행자, Cyclist와 같은 동적 객체를 검출해야한다. LiDAR 3D PointCloud Data(PCD)를 기반으로 한 Object Detection Task는 Bottom-up Pipeline을 통해 연구되어왔다. 즉, Hand-crafted Feature를 기반으로 지면 제거 후 객체에 대한 Clustering, Classification이 진행된다. 단순히 Hand-crafted Feature만으론 한계가 있기 때문에 Computer Vision 분야의 Deep Learning Methods가 도입되면서 PCD에 적용하려고 했지만, Sparse하고 3D 구조인 PCD의 특성 상 2D Image에 적용되는 Convol..
딥러닝/논문
2025. 2. 18. 13:05