
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 |
- ubuntu
- Reinforcement Learning
- LSTM
- 백준
- eecs 498
- CNN
- dfs
- Python
- deep learning
- MySQL
- machine learning
- 강화학습
- opencv
- C++
- AlexNet
- NLP
- real-time object detection
- r-cnn
- 딥러닝
- BFS
- DP
- 그래프 이론
- Mask Processing
- One-Stage Detector
- image processing
- two-stage detector
- 머신러닝
- YoLO
- MinHeap
- dynamic programming
- Today
- Total
JINWOOJUNG
Bellman Optimality Equation 본문
본 게시글은 인하대학교 유상조 교수님의 Reinforcement Learning Tutorial Seminar
수강 후정리를 위한 포스팅입니다.
모든 포스팅의 저작관은 유상조 교수님에게 있음을 사전 공지합니다.
Before This Episode
https://jinwoo-jung.tistory.com/14
Markov Decision Process(MDP)
본 게시글은 인하대학교 유상조 교수님의 Reinforcement Learning Tutorial Seminar 수강 후정리를 위한 포스팅입니다. 모든 포스팅의 저작관은 유상조 교수님에게 있음을 사전 공지합니다. Before This Episode
jinwoo-jung.tistory.com
지난 시간에 Bellman Expected Equation을 배웠다
vπ(s)=∑a∈Aπ(a|s)∑s′∈S,r∈Rp)s′,r|s,a)(r+γvπ(s′))
state-value function은 주어진 policy에 다라서 State s를 선택했을 때, 다음 State로 가능한 s′과 그때의 r에 대하여, r과 discount factor가 곱해진 s′에서의 state-value function으로 정의된다.
qπ(s,a)=∑s′∈S,r∈Rp(s′,r|s,a)(r+γ∑a′∈Aπ(a′|s′)qπ(s′,a′))
action-value function은 State s에서 Action a를 선택했을 때, 다음 State로 가능한 s′과 그때의 r에 대하여, r과 discount factor가 곱해진 policy에 의해 State s′에서 a′의 action을 선택했을 때의 action-value function으로 정의된다.
그렇다면 최적의 policy π는 어떻게 구할 수 있을까?
Optimal Policy in Bellman Expected Equation
이전 강의에서 우리는 optimal state-value, action-value function을 무수히 많은 policy에 대하여 각각의 function이 가장 큰 policy를 optimal 하다고 정의한 바 있다.
v∗(s)=maxπvπ(s)q∗(s,a)=maxπq∗(s,a)
Bellman Expected Equation은 closed form으로 정의되어 있어 해결할 수 있지만, policy가 미리 정의되어 있어야 함과 동시에 그때의 policy가 optimal 하다고 보장할 순 없다.
따라서 MDP: Optimal Policy 이론이 정의된다.
MDP: Optimal Policy
모든 다른 π 보다 같거나 더 좋은 optimal policy π∗가 있다고 하자.
따라서 optimal policy를 적용한 state-value, action-value function은 optimal 하다.
vπ∗(s)=v∗(s)
q+π∗(s.a)=q∗(s,a)
이를 만족하는 Optimal Policy는 다음과 같이 정의된다.
π∗(a|s)={1if a=argmax∀a∈A q∗(s,a)0otherwise}
즉, State s에서 Action a를 선택했을 때의 action-value function의 값이 가장 큰 action을 항상 취한다.
다시말하면, a 이후에 policy에 따른 발생가능한 모든 action에 따른 expected reward value가 가장 큰 action을 항상 취한다는 의미이다.
따라서 Optimal Policy에 따른 Optimal state-value function은 아래와 같이 정의된다.
v∗(s)=maxa q∗(s,a)
Bellman Optimality Equation
각 State s에서의 Optimal state-value와 Sate s에서 특정한 Action a를 했을 때의 Optimal action-value는 아래와 같이 정의된다.
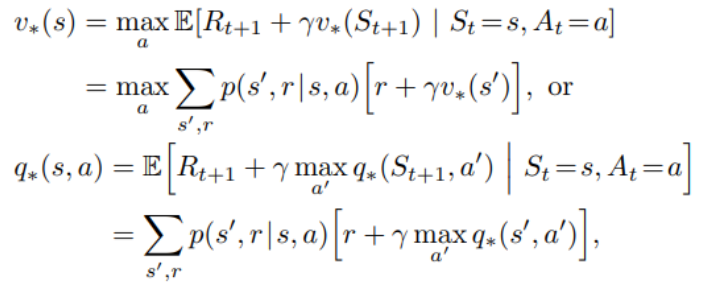
이전에 정의한 vπ에서 최적의 값을 구하기 때문에, v∗는 policy에 따른 확률적인 Action Selection이 아닌 maxa로 바뀌었음을 알 수 있다.
vπ 역시$ \underset{a'}{max} \ q_*(s',a')$로 바뀌는 이유 역시 policy에 따른 확률적인 Action Selection이 아닌 가장 큰 경우의 Action만 선택하기 때문이다.
따라서 MDP의 목적이었던 Optimal Policy는 Optimal action-value function을 구하는 문제로 연결된다.
하지만, Bellman Optimal Equation은 non-linear operator인 max operator가 존재하기에 matrix로 해결할 수 없다.
따라서 한번에 해결할 수 없으므로 iterative하게 근사화 시키는 접근법이 존재하였고 이는 강화학습으로 이어진다.
자세한 설명은 다음 시간에 깊게 파보자..
'Reinforcement Learning' 카테고리의 다른 글
| Monte Carlo Method (0) | 2024.01.19 |
|---|---|
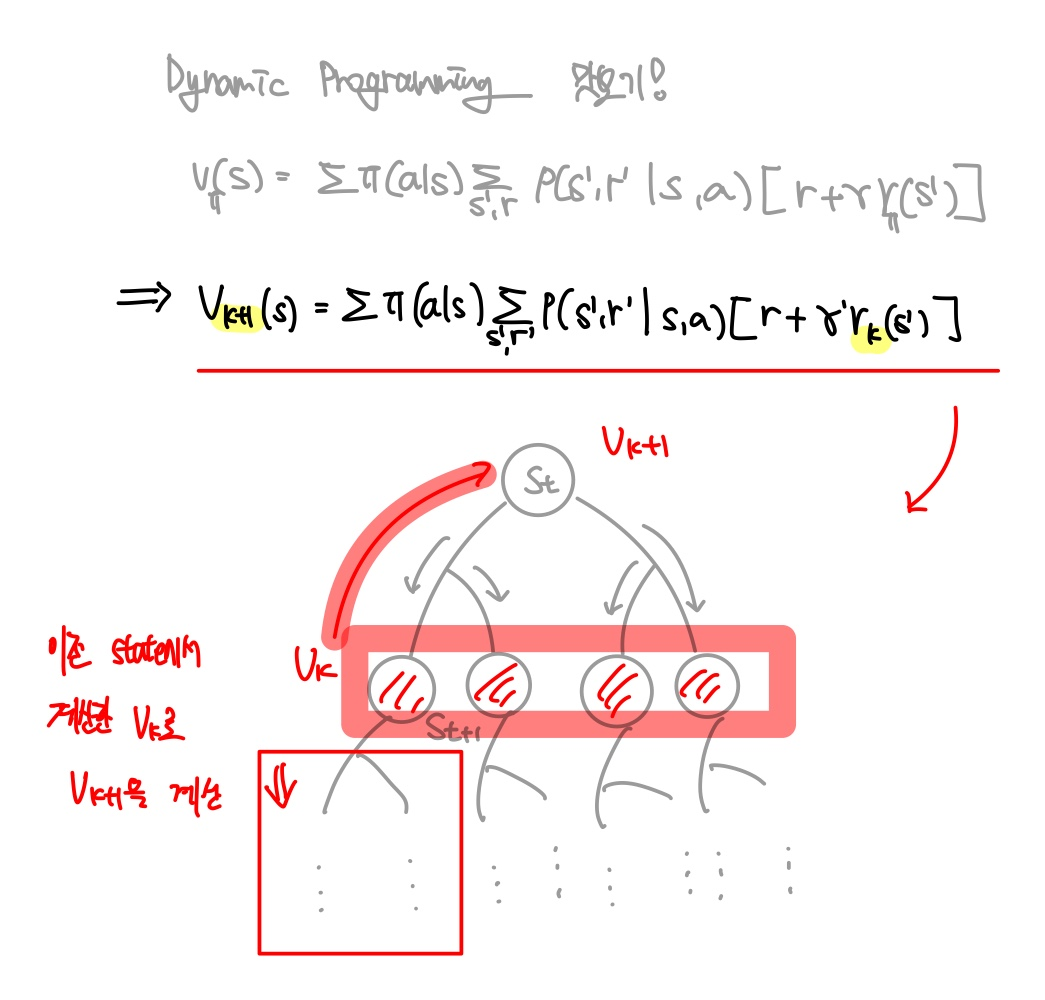
| Dynamic Programming (2) | 2024.01.03 |
| Markov Decision Process(MDP) (1) | 2023.12.29 |
| Markov Reward Process(MRP) (1) | 2023.12.29 |
| K-armed Bandit(2) (0) | 2023.12.28 |



